
A wide range of applications from tactical systems to Unmanned Systems software can benefit from real-time Line-of-Sight computation
Written
November 26, 2020

Written by the Engineering Team, Kongsberg Geospatial
For some time, line-of-sight (LOS) or “viewshed” calculations have been a staple feature of tactical applications. Depending on the system and software used, these can be real-time, or near real-time calculations that color the terrain in a map based on whether or not there is a clear line-of-sight to an arbitrary viewer position.
This feature has an immediately obvious tactical application and provides a useful mission planning capability. However, LOS calculations tend to be computationally expensive since they typically require ray-casting over a wide area, so they are generally constrained to a limited range, and restricted or otherwise constrained in frequency for real-time applications or for non-stationary observers.
Kongsberg Geospatial has added real-time line-of-sight visualization capabilities to their TerraLens geospatial SDK. Depending on the available hardware capabilities, and the terrain resolution, TerraLens can render the viewshed for a moving observer at up to 60Hz.
The API can highlight a field-of-view, which can range from a narrow band to a complete sphere. The colors which show visible / not visible areas, and the range of the line-of-sight visualization can be defined through the API. The accuracy of the resulting visualization is determined by the resolution of the available terrain data.
The capacity for displaying real-time viewshed updates for a moving observer has proven to be useful for mission planning and ground control for Unmanned Aerial Systems (UAS) in urban canyon environments.
Occlusions to line-of-sight aren’t necessarily a problem for BVLOS missions, but issues with signal propagation and reflections in an urban canyon can lead to data loss issues for some high-bandwidth data, including video links.
Application developers can leverage line-of-sight computation to help preview missions, and identify problem areas where the ground control station or observers risk losing sight of - or worse - data connectivity with the aircraft. Using LOS calculations, unmanned systems operators can easily preview missions and adjust the flight path to reduce the risk of data connectivity loss.
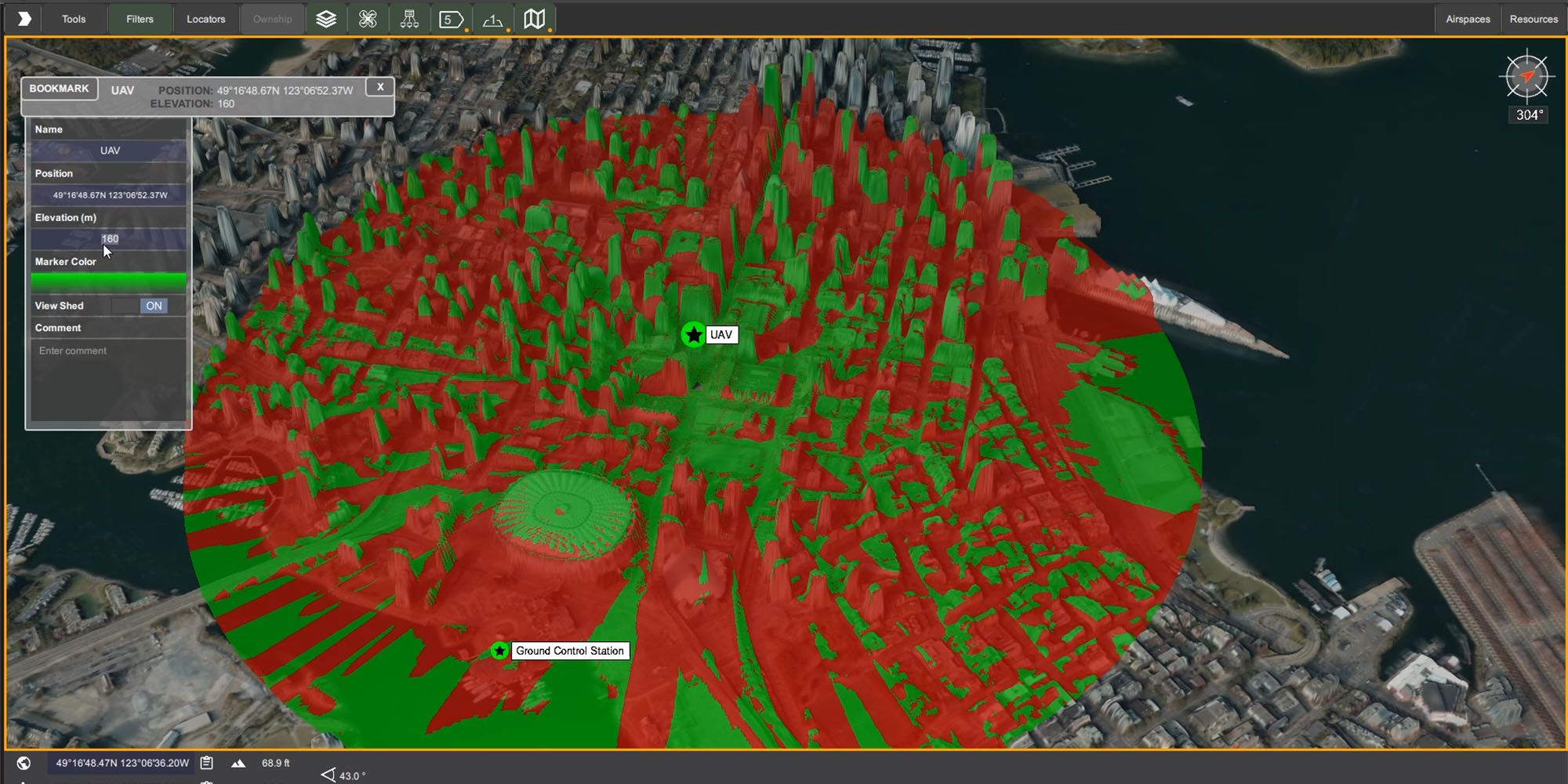
For example, in the image above, the IRIS Ground Control Station is being used to conduct a UAS mission in an “urban canyon” in downtown Vancouver, Canada. As the UAS moves through the flight path, the operator can easily see whether or not the line of sight between the aircraft and the Ground Control Station is occluded at any point along the flight path.
TerraLens is an operating system / IDE-agnostic geospatial Software Development Kit that has been optimized for high performance real-time applications. The IRIS UxS Ground Control Station was developed using TerraLens and QT / QML for Windows and Linux.
.svg)